
En primeiro lugar, a composición do sistema
1.O sistema de detección non-stop de sobrecarga de estradas está composto xeralmente polo sistema de recollida de información de sobrecarga de vehículos de carga frontal e forense e a xestión de información de sobrecarga de vehículos de carga de fondo.
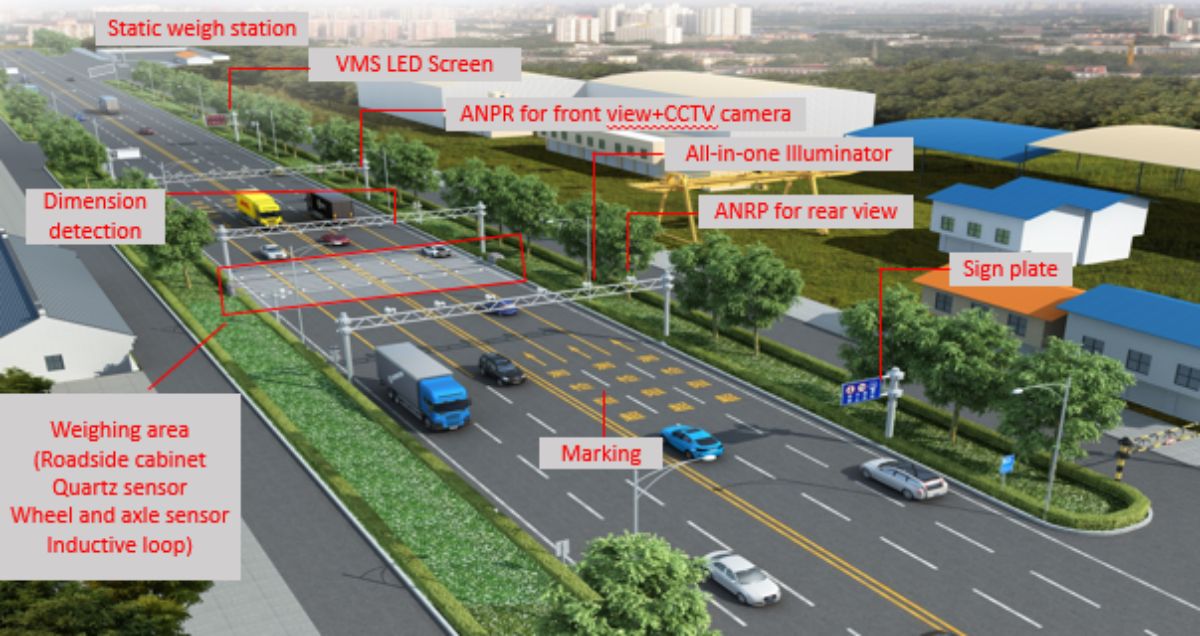
2. O sistema de recollida de información de sobrecarga de vehículos de carga frontal e forense xeralmente está composto por equipos de pesaxe sen parar, equipos de detección de tamaño de perfil do vehículo, equipos de recoñecemento e captura de matrículas, detector de vehículos, equipos de videovixilancia, equipos de divulgación de información, sinais de tráfico, fontes de alimentación e instalacións de protección contra raios, armarios de control in situ, recollida e procesamento de información e equipos de transmisión de rede, equipos de apoio e sinalización de tráfico e instalacións de sinalización de tráfico.
3. A plataforma de xestión de información de sobrecarga de vehículos de carga (incluída a aplicación directa) está composta xeralmente por plataformas de xestión de información de sobrecarga de condado (distrito), municipais e provinciais (incluída a aplicación directa).
2. Requisitos funcionais
1. Requisitos funcionais dos equipos de pesaxe sen parar
1.1 Rango de velocidades de funcionamento
O rango de velocidade do equipo de pesaxe sen parar é de (0,5 ~ 100) km/h para que os vehículos de carga pasen pola zona de detección sen parar.
1.2 Nivel de precisión do peso total do vehículo
(1) O erro máximo permitido no pesado do peso total do vehículo e da carga dentro do rango de velocidade de operación permitido do equipo de pesaxe sen parar non será inferior ás disposicións e requisitos dos niveis de precisión 5 e 10 do JJG 907 "Regulamento de verificación de aparellos de pesaxe automático de vehículos de estrada dinámica" (Táboa 2-1).
Táboa 2-1 Erro máximo permitido da pesada dinámica do peso total do vehículo
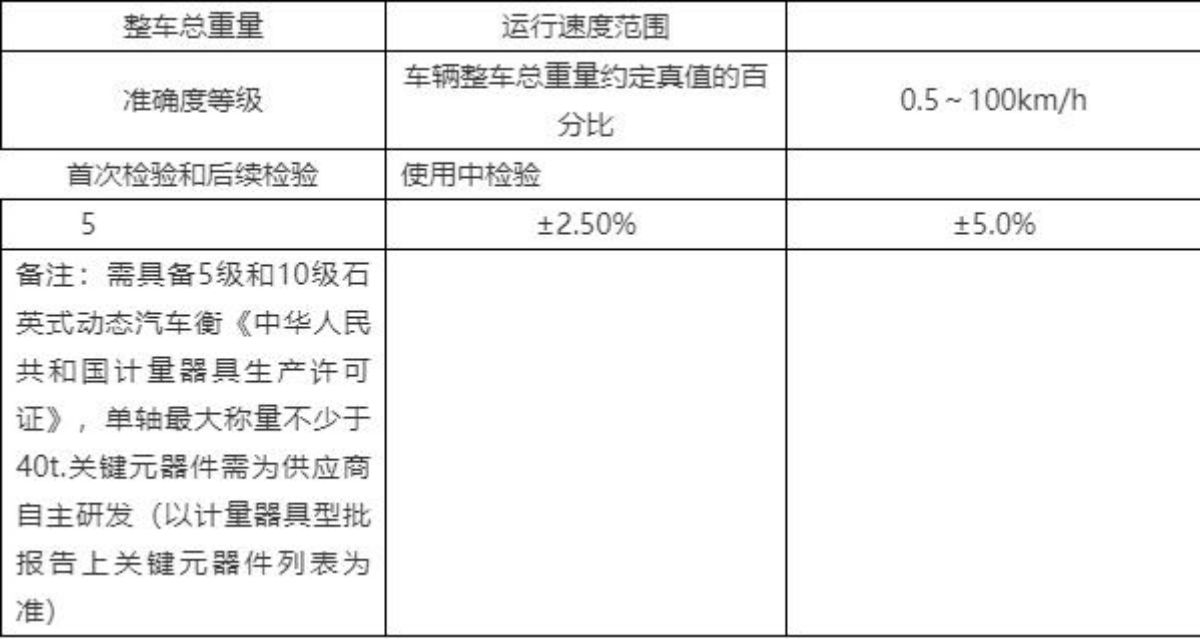
(2) Cando o vehículo de carga pasa pola zona de detección de pesaxe sen parar con comportamentos anormais de condución, como aceleración e desaceleración frecuente, báscula de salto, parada, curva en S, cruzamento, liña de presión, condución en marcha atrás ou parada e marcha nun curto período de tempo, o nivel de precisión do peso total do vehículo do equipo de pesaxe sen parar non será inferior aos requisitos da táboa 2-1. (Presionar carrís e conducir en sentido contrario son importantes).
1.3 A célula de carga utilizada no equipo de pesaxe sen parar cumprirá as disposicións e requisitos de GB/T7551 "Célula de carga", a vida útil será ≥ 50 millóns de eixes e o nivel de protección da célula de carga utilizada no pesado continuo non será inferior a IP68. 。
1.4 O tempo medio de traballo sen problemas dos equipos de pesaxe sen parar non será inferior a 4000 h, e o período de garantía dos compoñentes clave non será inferior a 2 anos e a vida útil non será inferior a 5 anos.
1.5 Requisitos de protección de apagado
(1) Cando a alimentación está apagada, o equipo de pesaxe sen parar debe poder almacenar automaticamente os parámetros e a información de pesaxe actualmente configurados, e o tempo de almacenamento non debe ser inferior a 72 h.
(2) En caso de falla de enerxía, o tempo de funcionamento do reloxo interno do equipo de pesaxe sen parar non debe ser inferior a 72 d.
1.6 Requisitos do tratamento anticorrosivo
As pezas metálicas expostas dos equipos de pesaxe sen parar deben tratarse con tratamento anticorrosivo de acordo coas disposicións pertinentes do GB/T18226 "Condicións técnicas para a anticorrosión de compoñentes de aceiro na enxeñaría de tráfico de estradas".
1.7 O erro de medición da velocidade do detector de vehículos do equipo de pesaxe sen parar debe ser ≤± 1 km/h e a precisión da detección do fluxo de tráfico debe ser ≥99%.
1.8 Os requisitos técnicos dos separadores de vehículos para equipos de pesaxe sen parar son os seguintes:
(1) A precisión de detección do número de eixes debe ser ≥98%.
(2) O erro de detección da separación dos eixos debe ser ≤± 10 cm.
(3) A precisión da clasificación do vehículo debe ser ≥ 95%.
(4) A taxa de recoñecemento entre canles debe ser ≥98%.
1.9 O rango aplicable de temperatura do ambiente de traballo debe cumprir -20 ° C ~ + 80 ° C, e os indicadores técnicos de resistencia á humidade ambiental deben cumprir as normativas e requisitos pertinentes dos equipos mecánicos e eléctricos ao aire libre de JT/T817 "Requisitos técnicos xerais e métodos de proba para equipos de sistemas electromecánicos de estradas".
1.10 Deben tomarse medidas a proba de choiva e de po, e o nivel de protección debe cumprir as disposicións e requisitos de JT/T817.

2. Requisitos funcionais dos equipamentos de proba do tamaño do perfil do vehículo
2.1 Cando o vehículo de carga atravesa a área de detección de pesaxe sen parar a unha velocidade de (0,5 ~ 100) km/h, debería poder completar automaticamente a detección rápida en tempo real das dimensións xeométricas e do modelo 3D da lonxitude, ancho e altura do vehículo de carga e producir os resultados de identificación correctos. O tempo de resposta non debe ser inferior a 30 ms e o tempo para completar un único resultado de detección e saída non debe ser superior a 5 s.
2.2 O rango de medición xeométrica da lonxitude, anchura e altura do vehículo de carga cumprirá os requisitos da táboa 2-2.
Táboa 2-2 Rango de medición do equipamento de proba do tamaño do perfil do vehículo
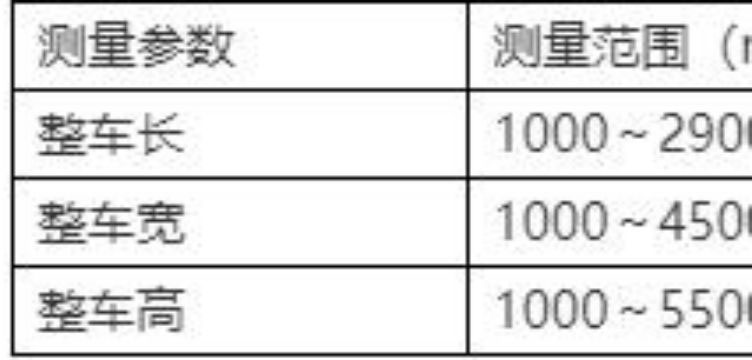
2.3 A resolución de medición da dimensión xeométrica da lonxitude, anchura e altura do vehículo de carga non é superior a 1 mm, e o erro de medición do equipo de detección de tamaño do contorno do vehículo debe cumprir os seguintes requisitos dentro do rango de 1 ~ 100 km/velocidade normal de funcionamento: (en termos de velocidade de marcha, debe ser coherente cos requisitos do equipo de pesaxe dinámico anterior).
(1) Erro de lonxitude ≤±500 mm;
(2) Erro de ancho ≤± 100 mm;
(3) O erro de altura ≤± 50 mm.
2.4 A frecuencia de detección de puntos con láser dos equipos de proba do tamaño do perfil do vehículo debe ser ≥1 kHz e debe ter 9 tipos de modelos de vehículos e funcións de detección de velocidade do vehículo especificadas no vehículo a motor GB1589 "Tamaño do esquema, carga por eixe e límites de calidade de automóbiles, remolques e trens de automóbiles".
2.5 Debe ter as funcións de vehículos de carga paralelos, xuízo de estado de condución en curva S, blindaxe de material negro e detección de tamaño xeométrico do perfil do vehículo de carga de material de alta reflectividade.
2.6 debería ter a clasificación dos modelos de vehículos a motor de mercadorías, o volume de tráfico, a velocidade de localización, a distancia horaria frontal, seguindo a porcentaxe de vehículos, o espazamento frontal e as funcións de detección de ocupación horaria. E a precisión de clasificación dos modelos de vehículos a motor de mercadorías debe ser ≥ 95%.
2.7 O rango aplicable de temperatura do ambiente de traballo debe cumprir -20 °C ~ +55 °C, e os indicadores técnicos de resistencia á humidade ambiental deben cumprir as normativas e requisitos pertinentes dos equipos mecánicos e eléctricos ao aire libre de JT/T817 "Requisitos técnicos xerais e métodos de proba para equipos de sistemas electromecánicos de estradas".
2.8 Os equipos de proba de tamaño do perfil do vehículo con láser deben instalarse cun pórtico cunha canle de mantemento
2.9 O nivel de protección do equipo de proba do tamaño do perfil do vehículo non debe ser inferior a IP67.
3. Requisitos funcionais dos equipamentos de recoñecemento e captura de matrículas
3.1 Os requisitos funcionais dos equipos de recoñecemento e captura de matrículas cumprirán as disposicións e requisitos pertinentes do GB/T 28649 "Sistema de identificación automática para as placas de número de vehículos a motor".
3.2 O equipo de recoñecemento e captura de matrículas estará equipado cunha luz de recheo ou luz intermitente, que poderá captar claramente o número de vehículo que pasa pola zona de detección de pesaxe sen parar en calquera condición meteorolóxica e emitir o resultado da identificación correcta.
3.3 O equipo de recoñecemento e captura de matrículas debe ser ≥ 99 % da precisión de recoñecemento de matrículas durante o día, e ≥ 95 % de precisión do recoñecemento de matrículas pola noite, e o tempo de recoñecemento non debe ser superior a 300 ms.
3.4 A imaxe da placa de matrícula do vehículo de transporte de mercancías recollida debe mostrarse claramente en formato JPG de ancho completo e o resultado do recoñecemento debe incluír o tempo de recoñecemento, a cor da matrícula, etc.
3,5 píxeles de imaxe de captura de recoñecemento de matrícula non deben ser inferiores a 5 millóns, outros píxeles de imaxe de captura non deben ser inferiores a 3 millóns, os vehículos de transporte a través da área de detección de pesaxe sen parar, deben capturar a parte dianteira do vehículo, dous lados do vehículo e a parte traseira do vehículo un total de non menos de 4 imaxes de alta definición.
3.6 Segundo a información da imaxe frontal de alta definición, a zona da placa de matrícula do vehículo de transporte de mercancías, as características dianteiras e da cabina, a cor dianteira, etc., deberían poder distinguir claramente o número de eixes, a cor da carrocería e a situación básica das mercadorías transportadas segundo a información da imaxe de alta definición no lateral do vehículo; segundo a información de imaxe de alta definición da parte traseira do vehículo, pódese distinguir o número de matrícula da cola, a cor da carrocería e outras informacións.
3.7 Cada imaxe debe ser superposta con información como a data de detección, a hora da proba, o lugar da proba, o peso total do vehículo e da carga, as dimensións do vehículo, o número de equipamento de imaxe forense, a loita contra a falsificación e outra información.
3.8 O ancho de banda da canle de transmisión de información da imaxe capturada non será inferior a 10 Mbps.
3.9 Debería ter funcións de autocomprobación de fallos, como comunicación anormal e fallo de alimentación.
3.10 O rango aplicable de temperatura do ambiente de traballo debe cumprir -20 °C ~ +55 °C, e os indicadores técnicos de resistencia á humidade ambiental deben cumprir as normativas e requisitos pertinentes dos equipos mecánicos e eléctricos ao aire libre de JT/T817 "Requisitos técnicos xerais e métodos de proba para equipos de sistemas electromecánicos de estradas".
3.11 O nivel de protección dos equipos de recoñecemento e captura de matrículas non debe ser inferior a IP67.
4 Requisitos funcionais dos equipos de videovixilancia
A cámara de vixilancia de vídeo 4.1 debe ter a función de cámara infravermella diurna e nocturna, e debe ser capaz de pesar sen parar a área de detección da función de cámara completa e gardar non menos de 10 segundos de datos de vídeo de recollida de evidencias de sobrecarga de vehículos de carga ilegal.
4.2 Debería ter as funcións de autodiagnóstico, calibración do campo de visión e compensación automática.
4.3 As imaxes de vídeo forense non deben ter menos de 3 millóns de píxeles e deben ser claras e estables.
4.4 Debe ter a función de rotación e zoom, e a rotación horizontal e vertical e o zoom da lente pódense realizar segundo o comando de control.
4.5 Debería ter a función de limpar e eliminar as lámpadas antinéboa de choiva e xeadas, e debería poder limpar, quentar e desconxelar a cuberta protectora a tempo.
4.6 As imaxes de vídeo forense deben transmitirse á plataforma de xestión de información de sobrecarga a nivel de condado (cidade) e de aplicación directa en tempo real.
4.7 Os equipos de videovixilancia e outros indicadores técnicos dos seus accesorios cumprirán as disposicións e requisitos pertinentes da GA/T995.
4.8 O rango aplicable de temperatura do ambiente de traballo debe cumprir -20 ° C ~ + 55 ° C, e os indicadores técnicos de resistencia á humidade ambiental deben cumprir as normativas e requisitos pertinentes dos equipos mecánicos e eléctricos ao aire libre de JT/T817 "Requisitos técnicos xerais e métodos de proba para equipos de sistemas electromecánicos de estradas".
5 Requisitos funcionais dos equipamentos de publicación de información
5.1 Debería poder divulgar información en tempo real sobre a sobrecarga do vehículo ao condutor do vehículo ilegal de sobrecarga.
5.2 Debería poder publicar e mostrar información como a alternancia de texto e o desprazamento.
5.3 Os principais indicadores funcionais e indicadores técnicos dos sinais de información variable LED de estrada cumprirán as disposicións e requisitos pertinentes do GB/T23828 "Sinais de información variable LED de estrada".
5.4 Pódese seleccionar a pantalla de visualización de sinal de información variable de autoestrada tipo pórtico de dobre columna con espazo de píxeles de uso habitual: 10 mm, 16 mm e 25 mm. O tamaño da área de visualización de catro carrís e seis carrís pode ser de 10 metros cadrados e 14 metros cadrados respectivamente. O formato de contido de visualización pode ser de 1 fila e 14 columnas.
5.5 Pódese seleccionar o espazamento de píxeles da pantalla de sinal de información variable LED dunha soa columna: 10 mm, 16 mm e 25 mm. O tamaño da pantalla pódese seleccionar entre 6 metros cadrados e 11 metros cadrados. O formato de contido de visualización pode ser de 4 filas e 9 columnas.
5.6 O deseño e a configuración dos sinais de información variable LED de estrada e a distancia de recoñecemento visual deben considerar plenamente as necesidades reais de velocidade e recoñecemento visual dos vehículos de mercadorías na sección da estrada, e cumprir as disposicións e requisitos pertinentes do GB/T23828 "Sinais de información variable LED de estrada".
6 Requisitos de configuración de sinais de tráfico
6.1 Configure un sinal de tráfico para entrar na "zona de pesaxe e detección sen parar" a unha distancia non inferior a 200 metros fronte á zona de detección de pesaxe sen parar.
6.2 Instalar un sinal de tráfico de "non cambio de carril" a non menos de 150 metros diante da zona de detección de pesaxe sen parar.
6.3 Colocar un sinal de tráfico de "Levantar a prohibición de cambio de carril" a unha distancia non inferior a 200 metros detrás da zona de detección de pesaxe sen parar.
6.4 A colocación dos sinais de tráfico na zona de detección de pesaxe sen parar cumprirá o deseño e os requisitos de GB5768 "Sinais e marcas de tráfico".
7. Requisitos dos equipamentos de alimentación e da posta a terra de protección contra raios
7.1 O sistema de recollida de información sobre sobrecarga e forense estará equipado con liñas de subministración de enerxía estables e fiables, que poderán cumprir os requisitos de funcionamento ininterrompido de subministración de enerxía durante 24 horas.
7.2 Adoptaranse as medidas necesarias de protección contra raios e sobretensións para a interface de subministración de enerxía e a interface de control do sistema de recollida de información sobre sobrecarga e de investigación forense e os compoñentes relacionados, e as medidas de protección deberán cumprir coas disposicións e requisitos pertinentes de JT/T817 "Requisitos técnicos xerais e métodos de proba para equipos de sistemas electromecánicos de estradas".
7.3 O sistema de recollida de información sobre sobrecarga e de investigación forense debería adoptar un método de conexión a terra próximo dun único punto e debería adoptarse o método de conexión a terra en paralelo de CC.
7.4 A protección contra raios e a resistencia eléctrica do equipo de recollida de información sobre sobrecarga e de investigación forense será ≤ 10 Ω e a resistencia de protección de terra será ≤ 4 Ω.
8 Requisitos funcionais do armario de control de campo

8.1 O gabinete de control in situ configurado co sistema de recollida de información sobre sobrecarga e forense debería poder almacenar procesadores de adquisición de datos, detectores de vehículos, interruptores de rede e outros equipos. Debería poder cargar a información de sobrecarga do camión na plataforma de aplicación directa administrativa de tráfico do Departamento Provincial de Transporte e poder transmitir a información de sobrecarga do camión ao sinal de información variable LED da estrada en tempo real para a súa liberación e visualización.
8.2 O armario de control debe estar deseñado cun selo de chasis de dobre capa, que pode evitar eficazmente o po e a choiva, e ten un sistema de control de temperatura independente.
8.3 O armario de control debe estar deseñado con ranuras para facilitar a expansión da función.
8.4 O armario de control estará equipado con equipos de protección de seguridade de datos para evitar a fuga de datos de detección de límites superiores.
9. Requisitos para a habilitación de zonas de pesaxe sen parar por sobrecarga da estrada
9.1 A área de detección de pesaxe sen parar está composta polo soporte do equipo de pesaxe sen parar (sensor de cristal de cuarzo) e as súas seccións de guía nos extremos dianteiro e traseiro (segundo a capa de rodadura endurecida de 30 metros por diante e 15 metros por detrás) (Figura 2-1).

Figura 2-1 Diagrama esquemático da zona de pesaxe sen parar
9.2 A localización da área de pesaxe e proba sen parar non debe situarse en plano, o raio da curva lonxitudinal é pequeno, a distancia de visión é escasa e a longa costa abaixo e outras seccións de estrada, e os indicadores lineais deben cumprir a norma ASTM E1318 "Especificación estándar para sistemas de pesaxe en movemento de estradas (WIM) e sistemas de proba de usuario requiridos". Métodos, os requisitos específicos son os seguintes:
(1) O radio de xiro da liña central da estrada da sección de guía de 60 m e da sección de estrada de guía traseira de 30 m na zona de detección de pesaxe sen parar debe ser ≥ 1,7 km.
(2) A pendente lonxitudinal da superficie da estrada na sección de guía dianteira de 60 m e a sección de estrada de guía traseira de 30 m na área de detección de pesaxe sen parar debe ser ≤2%.
(3) O valor de pendente transversal do pavimento i da sección da estrada de guía de 60 m dianteira e da sección da estrada de guía de 30 m traseira da área de detección de pesaxe sen parar debe cumprir o 1% ≤ i ≤ 2%.
(4) Non debe haber obstáculos que bloqueen a liña de visión do condutor dentro da sección da estrada guía de 150 m antes da zona de detección de pesaxe sen parar.
(5) A distancia entre a localización da zona de pesaxe e detección sen parar e a entrada e saída do túnel da estrada no mesmo tramo de estrada non será inferior a 2 km e non será inferior a 1 km.
(6) O erro horizontal da conexión entre o sensor e a superficie da estrada non é superior a 0,1 mm
9.3 Para garantir a precisión dos datos de pesaxe sen parar e a seguridade na condución, o illamento do carril da estrada da sección da estrada de guía de 60 m dianteira e da sección da estrada de guía de 30 m traseira da área de detección de pesaxe sen parar debe estar illado mediante unha liña continua.
9.4 Zona non-stop de pesaxe e ensaio para guiar a construción de tramos de estrada
(1) A capa da estrada da sección da estrada debe ser estable e o coeficiente de rozamento da beirarrúa debe cumprir os requisitos de deseño da sección da estrada.
(2) A superficie do pavimento da sección da estrada guía debe ser lisa e compacta e o pavimento asfáltico non debe ter rodeiras, buratos, afundimentos, conxestión, gretas, fendas da rede e protuberancias, e o pavimento de cemento non debe ter placas escalonadas, rotas, afundimentos, acumulación de barro e outras enfermidades. A planitude do pavimento de formigón de cemento e do pavimento de formigón asfáltico cumprirá as disposicións e requisitos pertinentes da JTGF80-1 "Normas de inspección e avaliación de calidade da enxeñaría de estradas".
(3) O ancho da superficie da estrada da sección da estrada guía debe ser capaz de soportar o paso normal do vehículo de carga máis ancho dentro do rango de pesaxe.
(4) A liña central do pavimento na zona de pesaxe e proba sen parar debe estar illada por liñas sólidas amarelas dobres (amarelas simples) e a liña de demarcación da pista debe estar illada por liñas continuas brancas.
3. Protocolo de interface e requisitos de formato de datos
O protocolo de interface e o formato de datos do sistema de detección non-stop de sobrecarga da estrada deben cumprir as disposicións e requisitos relevantes do "Plan de deseño de enxeñería de aplicación directa administrativa de tráfico de Fujian" para garantir a interconexión e o intercambio de información entre as plataformas de xestión de información de sobrecarga do condado (distrito), municipais e provinciais (incluída a aplicación directa).

Enviko Technology Co., Ltd
E-mail: info@enviko-tech.com
https://www.envikotech.com
Oficina de Chengdu: No 2004, Unidade 1, Edificio 2, No 158, Tianfu 4th Street, Zona de alta tecnoloxía, Chengdu
Oficina de Hong Kong: 8F, edificio Cheung Wang, 251 San Wui Street, Hong Kong
Fábrica: edificio 36, zona industrial de Jinjialin, cidade de Mianyang, provincia de Sichuan
Hora de publicación: 25-xan-2024




